Ph.D. Daegyu Lim CAIO at ROBROS
| Welcome to my website! I am currently a CAIO at ROBROS. Previously, I researched at the DYROS LAB and received a Ph.D. degree at Seoul National University (SNU) under the supervision of Prof. Jaehueng Park. My research is dedicated to building general-purpose humanoid robots, enhancing their capabilities in collision handling, dexterous manipulation, and agile locomotion. |

|
Experience
- [July. 2025 - Present] CAIO @ ROBROS Inc., Seoul, Republic of Korea
- [Mar. 2024 - June. 2025] Principal Engineer @ ROBROS Inc., Seoul, Republic of Korea
Education
- Ph.D. in Transdisciplinary Studies. Mar. 2017 - Feb. 2024. Seoul National University, Seoul, Republic of Korea
- B.A. in Mechanical and Aerospace Engineering. Mar. 2012 - Feb. 2017. Seoul National University, Seoul, Republic of Korea
Publications
A Model Predictive Capture Point Control Framework for Robust Humanoid Balancing via Ankle, Hip, and Stepping Strategies
Myeong-Ju Kim, Daegyu Lim, Gyeongjae Park, Jaeheung Park. TRO 2025.

The robust balancing capability of humanoid robots has been considered as one of the crucial requirements for their mobility in real environments. In particular, many studies have been devoted to the efficient implementation of human-inspired ankle, hip, and stepping strategies, to endow humanoids with human-level balancing capability. In this p... Read more 06 May 2025
MOB-Net: Limb-modularized Uncertainty Torque Learning of Humanoids for Sensorless External Torque Estimation
Daegyu Lim, Myeong-Ju Kim, Junhyeok Cha, Jaeheung Park. IJRR 2025.
Momentum observer (MOB) can estimate external joint torque without requiring additional sensors, such as force/torque or joint torque sensors. However, the estimation performance of MOB deteriorates due to the model uncertainty which encompasses the modeling errors and the joint friction. Moreover, the estimation error is significant when MOB is... Read more 01 Jan 2025
Proprioceptive External Torque Learning for Floating Base Robot and its Applications to Humanoid Locomotion
Daegyu Lim, Myeong-Ju Kim, Junhyeok Cha, Donghyeon Kim, Jaeheung Park. IROS 2023.
The estimation of external joint torque and contact wrench is essential for achieving stable locomotion of humanoids and safety-oriented robots. Although the contact wrench on the foot of humanoids can be measured using a force-torque sensor (FTS), FTS increases the cost, inertia, complexity, and failure possibility of the system. This paper int... Read more 28 Jul 2023
Foot Stepping Algorithm of Humanoids with Double Support Time Adjustment based on Capture Point Control
Myeong-Ju Kim, Daegyu Lim, Gyeongjae Park, Jaeheung Park. ICRA 2023.
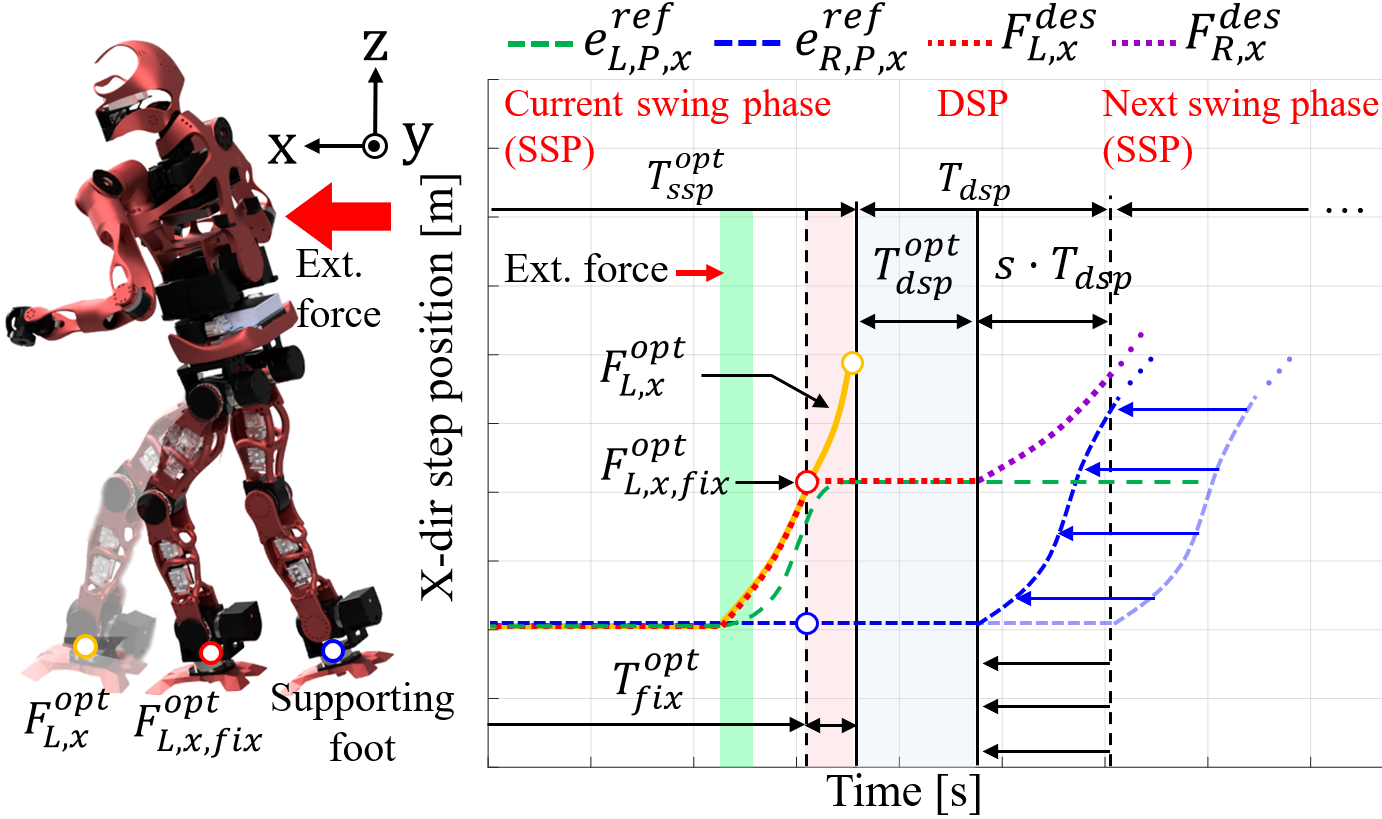
Recently, foot stepping strategies of humanoid robots has been actively developed for robust balancing of humanoids against disturbances. In this paper, a novel stepping algorithm adjusting double support phase (DSP) time is proposed. First, the stepping algorithm is proposed based on a model predictive control (MPC) framework for capture point ... Read more 20 Jan 2023
Humanoid Balance Control using Centroidal Angular Momentum based on Hierarchical Quadratic Programming
Myeong-Ju Kim, Daegyu Lim, Gyeongjae Park, Jaeheung Park. IROS 2022.
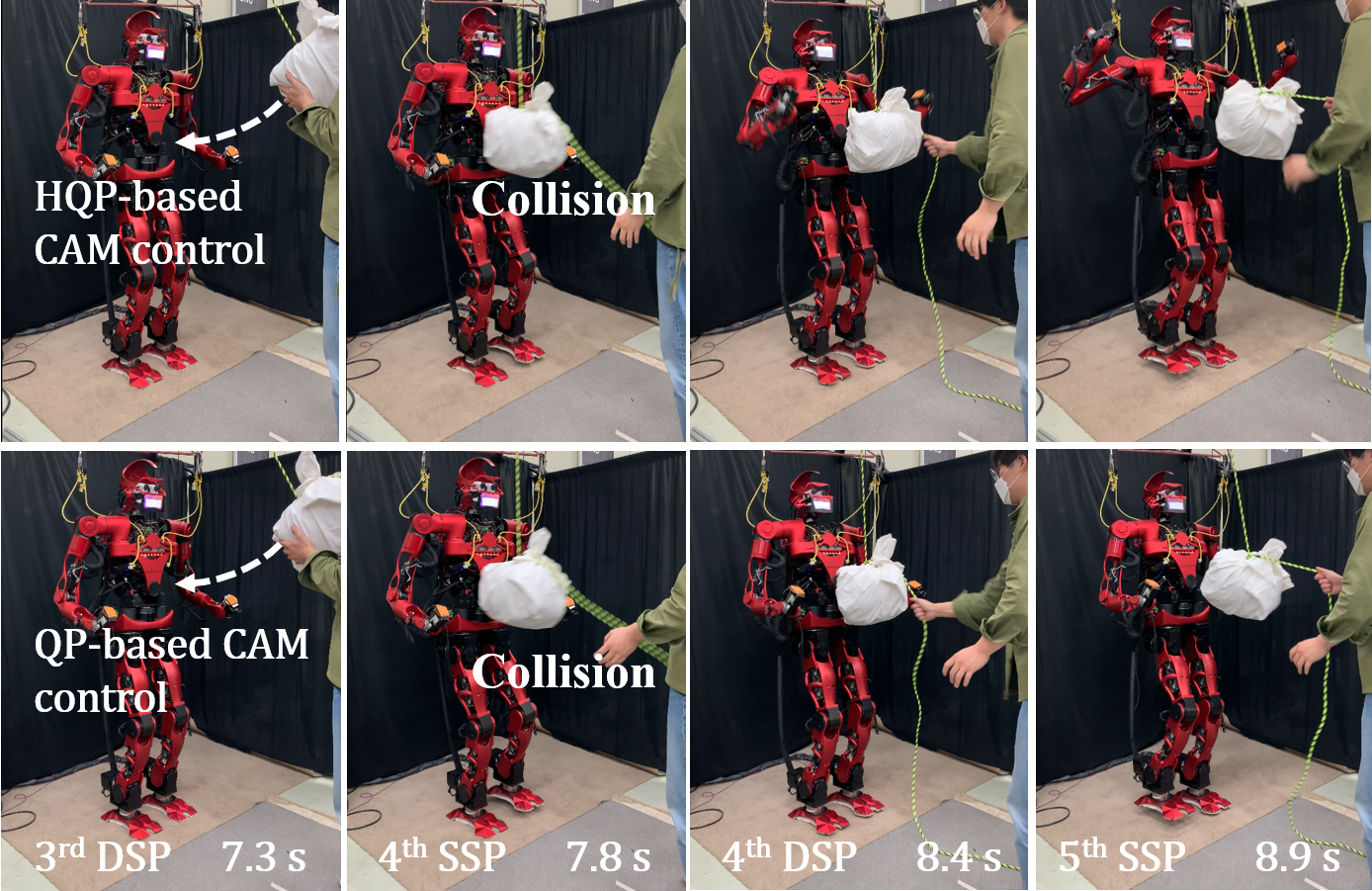
— Maintaining balance to external pushes is one of the most important features for a humanoid to walk in a real environment. In particular, methods for counteracting to pushes using the centroidal angular momentum (CAM) control have been actively developed. In this paper, a CAM control scheme based on hierarchical quadratic programming (HQP) is ... Read more 07 Oct 2022