Abstract
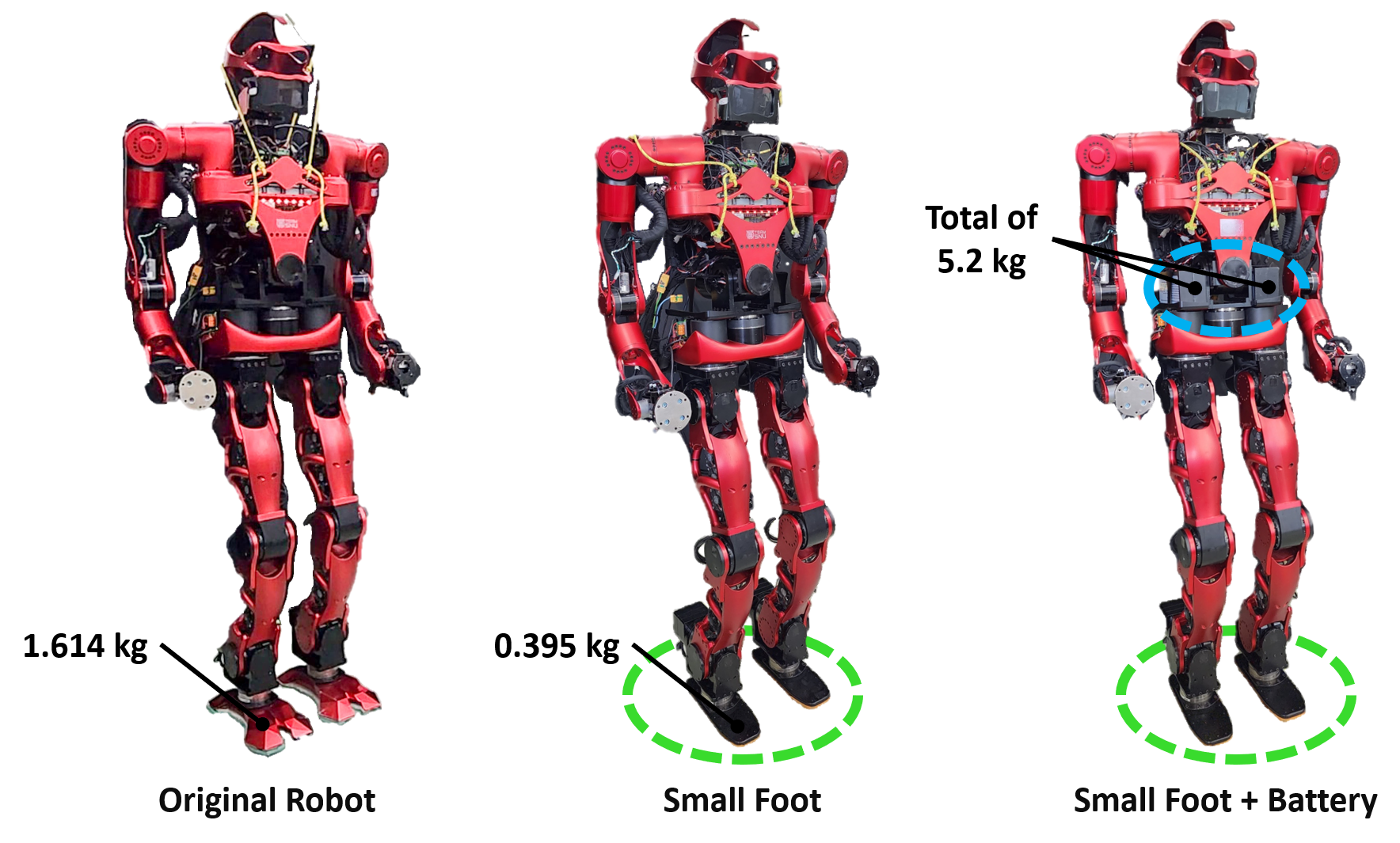
The estimation of external joint torque and contact wrench is essential for achieving stable locomotion of humanoids and safety-oriented robots. Although the contact wrench on the foot of humanoids can be measured using a force-torque sensor (FTS), FTS increases the cost, inertia, complexity, and failure possibility of the system. This paper introduces a method for learning external joint torque solely using proprioceptive sensors (encoders and IMUs) for a floating base robot. For learning, the GRU network is used and random walking data is collected. Real robot experiments demonstrate that the network can estimate the external torque and contact wrench with significantly smaller errors compared to the model-based method, momentum observer (MOB) with friction modeling. The study also validates that the estimated contact wrench can be utilized for zero moment point (ZMP) feedback control, enabling stable walking. Moreover, even when the robot’s feet and the inertia of the upper body are changed, the trained network shows consistent performance with a model based calibration. This result demonstrates the possibility of removing FTS on the robot, which reduces the disadvantages of hardware sensors.
-
Supplementary Video
-
Experiments Video
