Ph.D. Daegyu Lim CAIO at ROBROS
Projects
Imitation Learning for Dexterous Dual Manipulation.
[04.2024 ~ 07.2024].

Results ACT-PTE Project Page Read more
Bolt-10: Open source bipedal robot platform.
[03. 2022 - ].
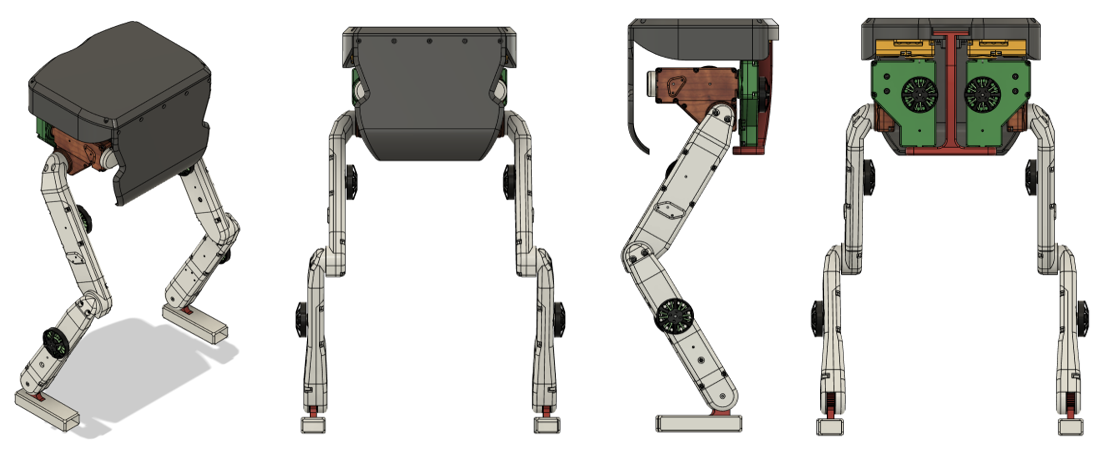
Paper GOAL This project aims to develop an open-source bipedal platform to foster research and education on the bipedal walking algorithm. This project is based on the existing open-source bipedal robot, BOLT, but we increase the degrees of freedom of BOLT from 6 to 10 resulting in BOLT-10. BOLT-10 BOLT-10 has two additional joints in each le... Read more
AVATAR XPRIZE COMPETITION.
[01.2020 ~ 11.2022].
System Paper Motion Retargeting Paper Summary of TeamSNU in AVATAR XPRIZE Semifinal Team Selection Video SemiFinal Qualification Video: Pass-it-on Charades with Humanoid Semifinal Highlight Final-DAY1 Final-DAY2 Read more