GOAL
This project aims to develop an open-source bipedal platform to foster research and education on the bipedal walking algorithm. This project is based on the existing open-source bipedal robot, BOLT, but we increase the degrees of freedom of BOLT from 6 to 10 resulting in BOLT-10.
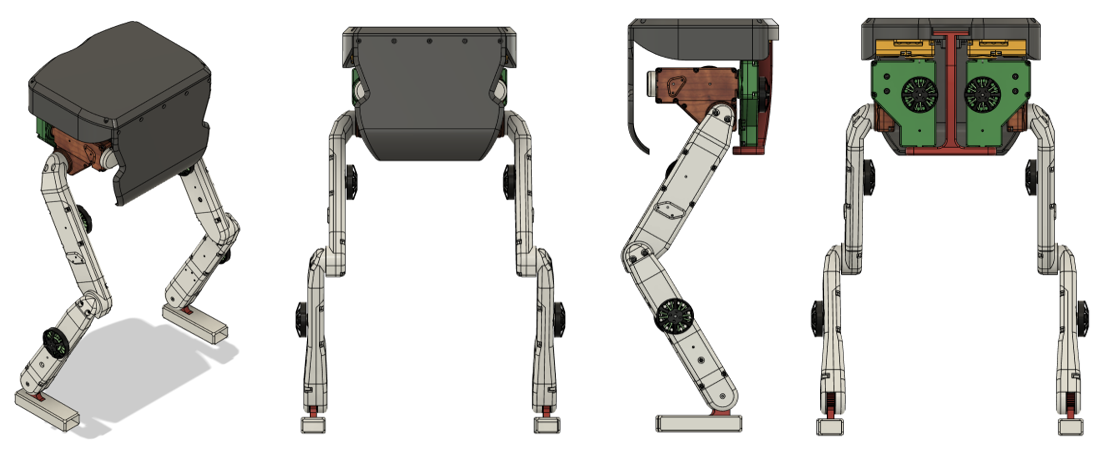
BOLT-10
BOLT-10 has two additional joints in each leg: the hip-yaw and ankle-pitch joint.