Ph.D. Daegyu Lim CAIO at ROBROS
| Welcome to my website! I am currently a CAIO at ROBROS. Previously, I researched at the DYROS LAB and received a Ph.D. degree at Seoul National University (SNU) under the supervision of Prof. Jaehueng Park. My research is dedicated to building general-purpose humanoid robots, enhancing their capabilities in collision handling, dexterous manipulation, and agile locomotion. |

|
Experience
- [July. 2025 - Present] CAIO @ ROBROS Inc., Seoul, Republic of Korea
- [Mar. 2024 - June. 2025] Principal Engineer @ ROBROS Inc., Seoul, Republic of Korea
Education
- Ph.D. in Transdisciplinary Studies. Mar. 2017 - Feb. 2024. Seoul National University, Seoul, Republic of Korea
- B.A. in Mechanical and Aerospace Engineering. Mar. 2012 - Feb. 2017. Seoul National University, Seoul, Republic of Korea
Publications
Online Telemanipulation Framework on Humanoid for both Manipulation and Imitation
Daegyu Lim, Donghyeon Kim, Jaeheung Park. UR 2022.
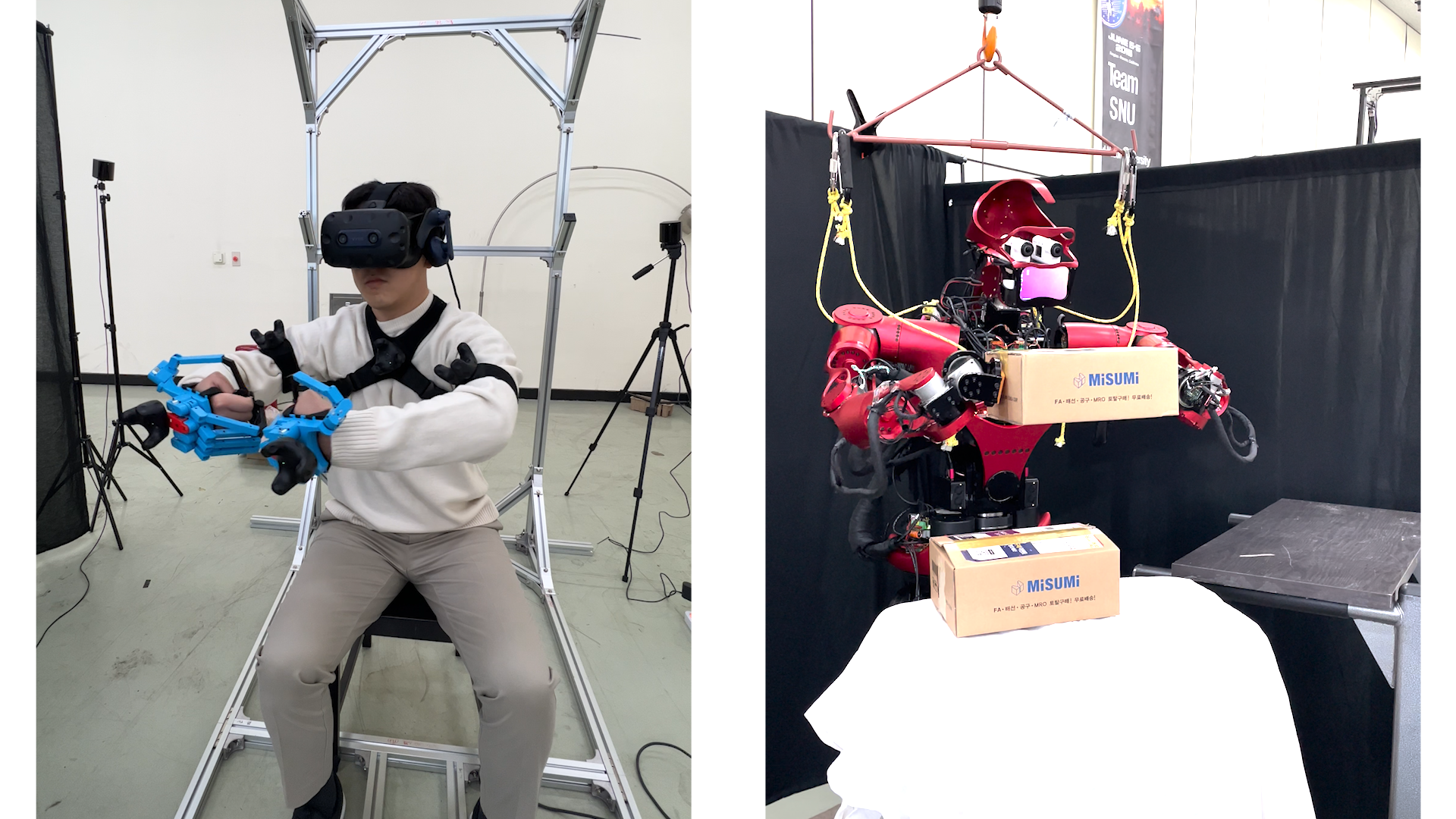
Teleoperation of the robot is a promising technology that brings the robot to the real life because the complex decision-making algorithm can be replaced by the supervision of the human operator. To teleoperate the high dimensional humanoid robot intuitively like moving the operator’s own body, a motion retargeting algorithm is required to bridg... Read more 04 Jul 2022
Transferable Collision Detection Learning for Collaborative Manipulator Using Versatile Modularized Neural Network
Donghyeon Kim†, Daegyu Lim†, Jaeheung Park. TRO 2021.
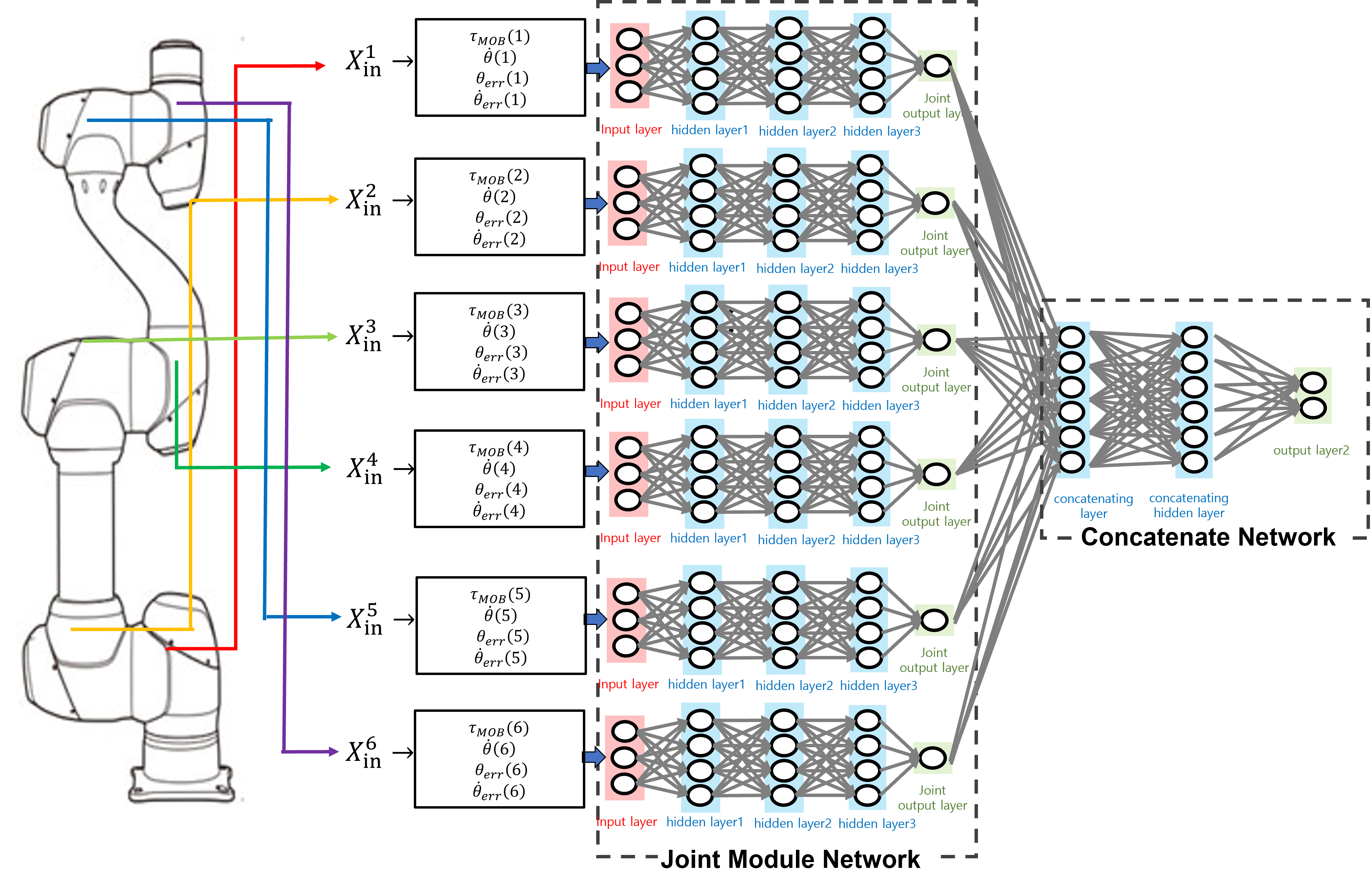
As human-robot collaboration increases and robots are applied to everyday life, interest in safety issues is increasing. To be safely used in real life, in addition to collision prevention algorithms, robots need to quickly detect unexpected collisions and take appropriate actions. Recently, deep learning-based collision detection algorithms hav... Read more 21 Dec 2021
Momentum Observer-Based Collision Detection Using LSTM for Model Uncertainty Learning
Daegyu Lim†, Donghyeon Kim†, Jaeheung Park. ICRA 2021.
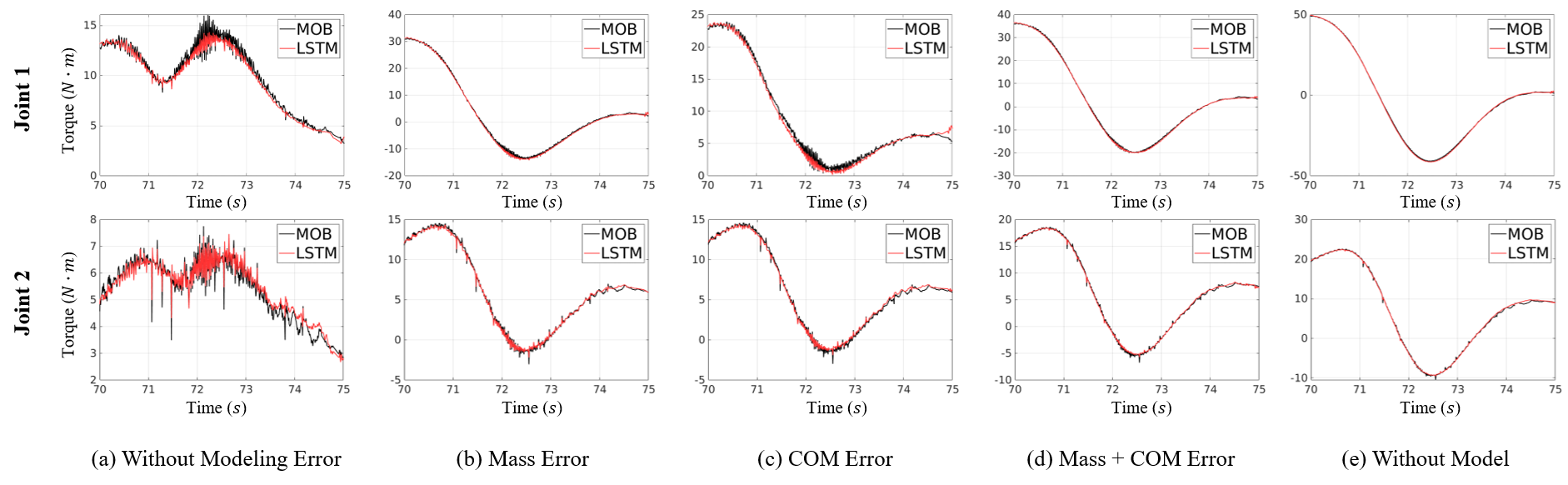
As robots begin to collaborate with people in real life, safety needs to be rigorously ensured to reliably employ robots nearby. In addition to collision prevention algorithms, studies are being actively conducted on collision handling methods. Momentum Observer (MOB) was developed to estimate disturbance torque without using joint acceleration.... Read more 30 May 2021
Online Walking Pattern Generation for Humanoid Robot with Compliant Motion Control
Mingon Kim, Daegyu Lim, Jaeheung Park. ICRA 2019.
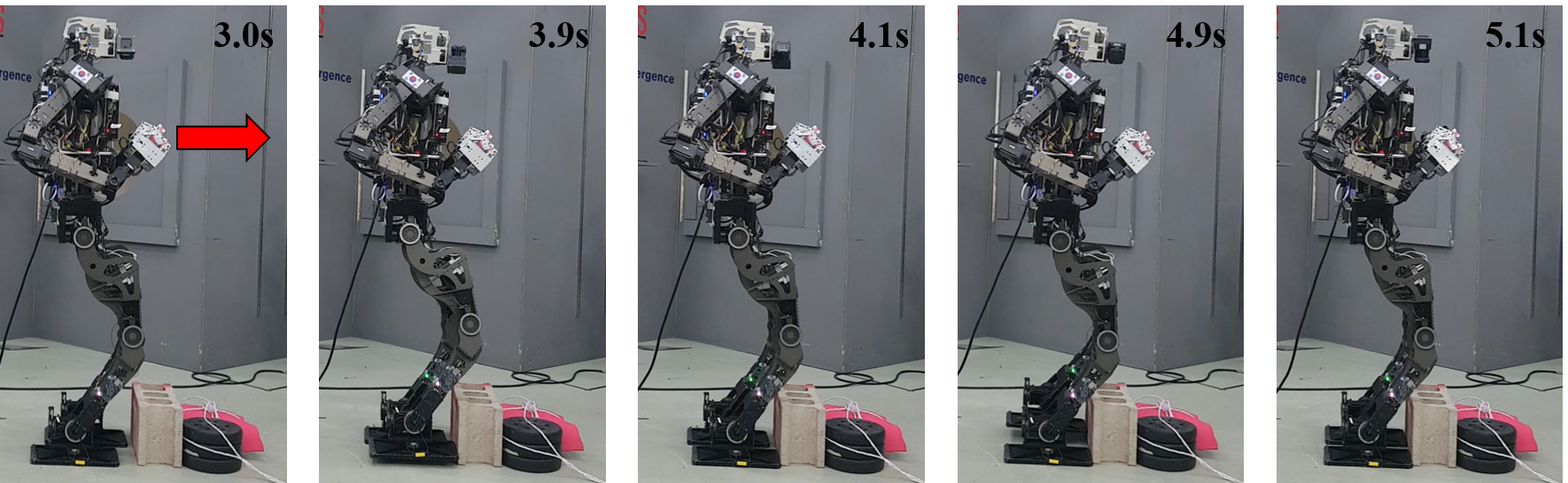
The compliant motion of humanoid robots is one of their most important characteristics for interacting with humans and various environments in the real world. During walking, compliant motion ensures stable contact between the foot and ground, but walking stability is degraded by position tracking performance and unknown disturbances. To address... Read more 20 May 2019