Abstract
Teleoperation of the robot is a promising technology that brings the robot to the real life because the complex decision-making algorithm can be replaced by the supervision of the human operator. To teleoperate the high dimensional humanoid robot intuitively like moving the operator’s own body, a motion retargeting algorithm is required to bridge the kinematics and dynamics differences between the robot and the operator. We propose the telemanipulation framework for the upper body of the humanoid only using 6 Virtual Reality (VR) trackers. The framework consists of the pose calibration procedure, the motion mapping method, and the multi-task control using Hierarchical Quadratic Programming (HQP). To validate the effect of the proposed method, three experiments are conducted including a user study for analysis of the hand position mapping, a dual-arm telemanipulation task in a real robot, and a comparison of the mapping methods in visual similarity.
-
Appearance Imitation Comparison

-
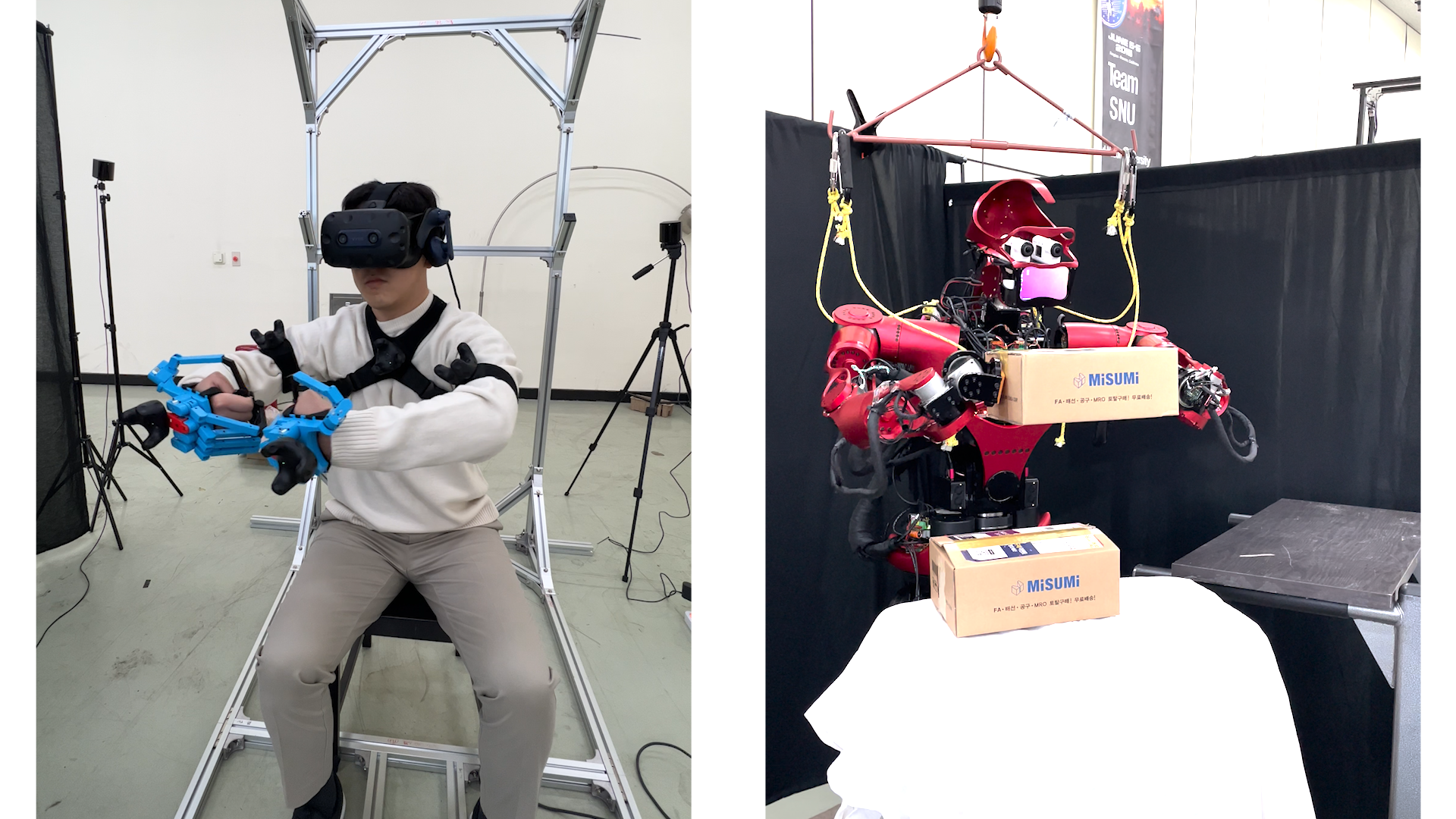
Dual-Arm Manupulation

-
Presentation (by Daegyu Lim)
